适配一块新的开发板
请确保你熟悉CMake,Kconfig与所使用的编译器,否则你极有可能遇到难以解决的问题。
我们要做什么
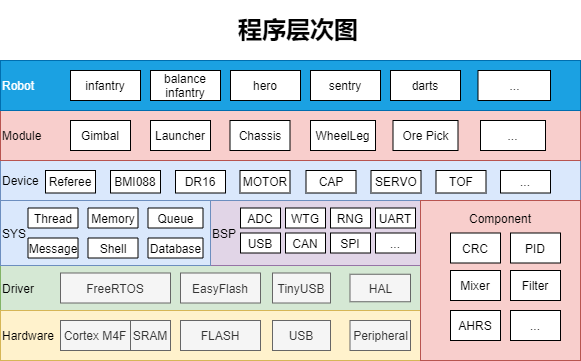
这是以大疆C型开发板作为参考的程序架构图,Hardware层为开发板硬件。我们要先编写驱动,以便在开发板上运行操作系统,操作硬件外设,即为Driver层。最后为不同操作系统和外设提供统一的接口供上层代码调用,即BSP和SYS层。
使用CMake组织开发板工程
确保你能够使用CMake编译出开发板的完整固件,我们将会使用此工程移植为XRobot的一个完整BSP。 如果开发板主控为STM32,可参考其他STM32开发板的BSP通过STM32CUBEMX生成。
选择编译器
如果你的开发板所使用的编译器并不能在toolchain文件夹中找到同名cmake文件,请参考toolchain/arm-none-eabi.cmake,为你的开发板创建一个新的cmake文件,并在其中进行编译器设置。
在hw/bsp创建新的BSP文件夹
一个完整的BSP应当包含以下文件,其中不应当包含main函数,只在bsp_init()函数中完成所有初始化动作,并在bsp_xx.c中实现对应外设的操作接口。
.
├── board.cmake
├── config
├── debug
│ └── launch.json
├── drivers
│ ├── bsp_xx.c
│ ├── bsp_xx.h
│ ├── bsp.c
│ ├── bsp.h
│ └── CMakeLists.txt
├── Kconfig
├── toolchain.cmake
└── main.cpp
board.cmake
# 需要与文件夹同名
set(BOARD_NAME your_board_name)
# 定义后面可能需要的路径名
set(BOARD_DIR ${BSP_DIR}/${BOARD_NAME})
# 包含所需要的.cmake脚本
include(${MCU_DIR}/xx/cmake/xx.cmake)
# 加入driver下所有CMake项目
add_subdirectory(${BOARD_DIR}/drivers)
# 添加可执行文件
add_executable(${PROJECT_NAME}.elf ${BOARD_DIR}/main.cpp)
# 添加链接库
target_link_libraries(
${PROJECT_NAME}.elf
PUBLIC bsp
PUBLIC system
PUBLIC robot
)
# 添加头文件路径
target_include_directories(
${PROJECT_NAME}.elf
PUBLIC ${CMAKE_CURRENT_SOURCE_DIR}
PRIVATE $<TARGET_PROPERTY:bsp,INTERFACE_INCLUDE_DIRECTORIES>
PRIVATE $<TARGET_PROPERTY:system,INTERFACE_INCLUDE_DIRECTORIES>
PRIVATE $<TARGET_PROPERTY:robot,INTERFACE_INCLUDE_DIRECTORIES>
)
toolchain.cmake
# 完成对编译器的配置
set(CMAKE_C_COMPILER clang)
set(CMAKE_CXX_COMPILER clang++)
set(CMAKE_ASM_COMPILER clang)
Kconfig
开发板的参数和功能配置,没有内容需要放置空文件。任何Kconfig的选项被选择之后,都会以cmake变量和宏定义的形式加入到编译过程去,在工程的每一处都能够使用。
driver
bsp.c和bsp.h里需要定义bsp_init()函数,其他外设参考hw/bsp/rm-c/drivers编写。只要求头文件的函数声明和枚举格式相同,不关心函数的具体实现,实现对应功能即可。
debug
launch.json为VSCode调试的配置文件,编译时会自动拷贝到.vscode目录下。
main.cpp
分别执行对bsp,robot和system进行初始化。因为某些厂商提供的sdk中已经包含了main函数(比如ESP-IDF),所以每一个BSP都要自行提供main函数来初始化XRobot。
#include "bsp.h"
#include "robot.hpp"
int main() {
bsp_init();
robot_init();
}
选择此开发板
如果配置合理,在命令行输入./project.py config即可选择刚刚创建的开发板。